Công nghệ cảm biến cảm ứng nâng cao tự động hóa công nghiệp
Công nghệ cảm biến quang học hoặc từ tính thường gặp khó khăn khi kết hợp giữa độ chính xác cao và khả năng chống nhiễm bẩn. Tuy nhiên, công nghệ cảm biến cảm ứng có thể mang lại khả năng xác định vị trí đáng tin cậy và bền vững cho nhiều ứng dụng công nghiệp.
Trong bất kỳ ứng dụng nào sử dụng động cơ cho tự động hóa, việc đảm bảo điều khiển chính xác động cơ là điều cần thiết. Để thực hiện được điều này, cần biết vị trí và tốc độ của rô-to trong động cơ, thường được gắn vào trục và chuyển động liên quan đến stato cố định. Ba loại bộ mã hóa quay phổ biến nhất cho công việc này là: quang học, từ tính và cảm ứng, mỗi loại có ưu điểm và nhược điểm riêng.
Bộ mã hóa quang học có độ chính xác tốt và không bị ảnh hưởng bởi các từ trường trong môi trường công nghiệp. Tuy nhiên, chúng khá đắt và dễ bị ảnh hưởng bởi bụi bẩn trên đĩa quay, nguồn sáng, đầu dò ánh sáng hoặc các lỗi về vòng bi.
Bộ mã hóa từ tính thường được sử dụng trong các ứng dụng có số lượng lớn nhưng không yêu cầu độ chính xác cao. Mặc dù không bị ảnh hưởng bởi bụi bẩn, chúng có thể bị tác động tiêu cực bởi các từ trường.
Bộ mã hóa cảm ứng khắc phục những nhược điểm trên vì chúng đạt độ chính xác vị trí cao hơn so với bộ mã hóa từ tính và có giá thành rẻ hơn so với bộ mã hóa quang học. Đặc biệt, chúng rất thích hợp cho các môi trường khắc nghiệt do có thể chịu được nhiễm bẩn, rung động và các từ trường bên ngoài. Ngoài ra, chúng không nhạy cảm với thay đổi nhiệt độ và có số lượng linh kiện thấp, giúp giảm kích thước, chi phí và độ phức tạp. Về mặt môi trường, bộ mã hóa cảm ứng không cần sử dụng các vật liệu đất hiếm có trong một số nam châm.
Ví dụ về cảm biến
Để minh họa ưu điểm của công nghệ bộ mã hóa cảm ứng, hãy xem xét một ví dụ về cảm biến cảm ứng: cảm biến vị trí NCS32100 của onsemi. Cảm biến này bao gồm một bộ điều khiển và giao diện cảm biến cho việc cảm nhận góc với độ phân giải cao, độ chính xác cao khi kết hợp với một cảm biến PCB (bo mạch in) không tiếp xúc. Nó có khả năng cấu hình linh hoạt, cho phép kết nối với nhiều mẫu cảm biến cảm ứng và cung cấp nhiều định dạng đầu ra kỹ thuật số.
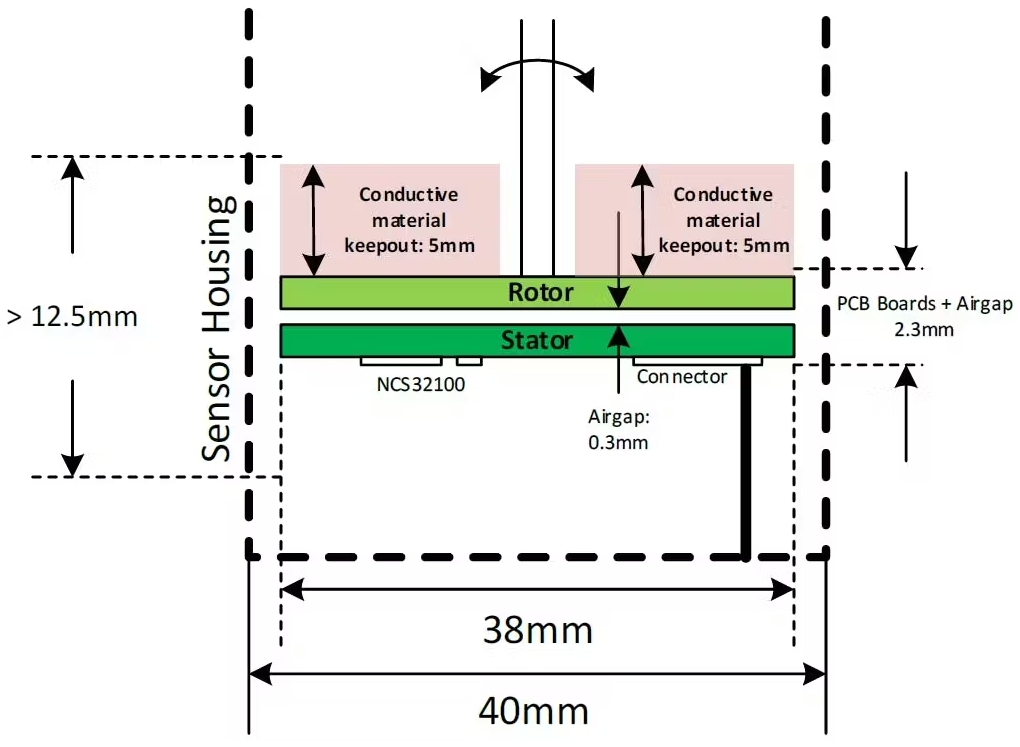
Hình 1: Cấu tạo đầy đủ của bộ mã hóa quay
Hình 1 cho thấy sơ đồ cắt ngang của một hệ thống bộ mã hóa quay hoàn chỉnh, bao gồm rô-to và stato, cả hai đều là PCB, với rô-to được gắn vào trục trung tâm. Hình ảnh này cũng cho thấy cảm biến NCS32100, được gắn trên PCB stato cố định, cùng với các đầu nối cho nguồn và dữ liệu. Hai PCB song song với nhau, tách ra bởi một khoảng không khí từ 0,1mm đến 1mm.
NCS32100 là bộ mã hóa tuyệt đối, nghĩa là nó có thể xác định vị trí mà không cần đĩa quay, rất hữu ích để xác định vị trí khi khởi động hoặc nếu hệ thống bị thay đổi trong quá trình ngừng hoạt động. Nó cung cấp độ chính xác vị trí tốt hơn ±50 arcsec, hoặc 0,0138 độ quay cơ học - mức độ chính xác mà trước đây chỉ có thể đạt được với bộ mã hóa quang học. Độ chính xác này có thể đạt được ở tốc độ quay lên đến 6.000 vòng/phút (RPM), và NCS32100 có thể hoạt động ở tốc độ lên đến 45.000 RPM, mặc dù với độ chính xác giảm nhẹ.
Để tích hợp NCS32100 dễ dàng hơn, onsemi đã phát triển các công cụ hỗ trợ cùng với một công cụ thiết kế PCB trực tuyến. Công cụ này bao gồm một thiết kế tham khảo cho NCS32100, được hiển thị trong Hình 2, nơi các mục bên trái của đường nét đứt màu xanh dương nằm trên bảng PCB stato.
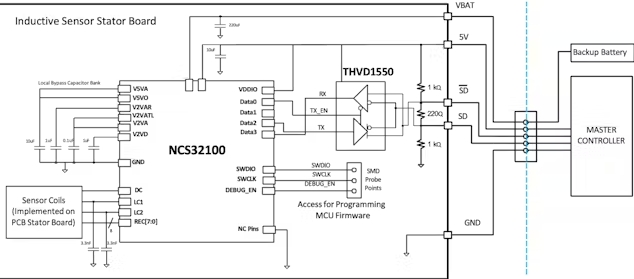
Hình 2: Sơ đồ khối thiết kế tham khảo NCS32100 (đơn giản hóa)
Trong một hệ thống xác định vị trí, hai bộ dây dẫn hoặc cuộn dây (mịn và thô) được in trên cả hai bề mặt đĩa (stato và rô-to). Một đường dẫn thứ ba gọi là cuộn dây kích thích được in trên PCB stato (xem Hình 3).
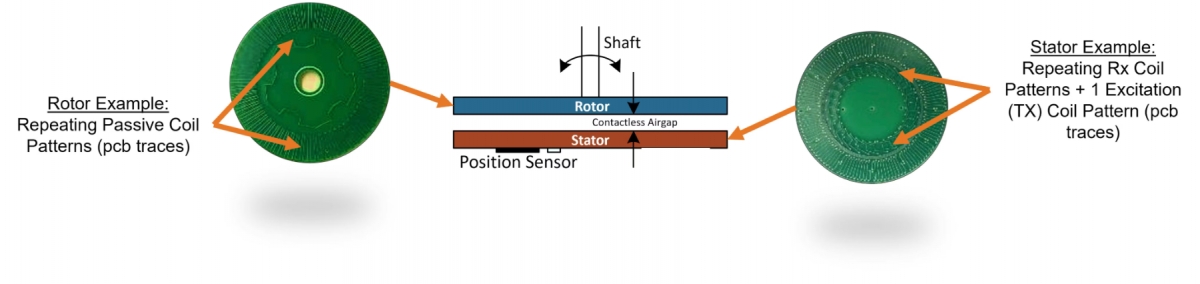
Hình 3: Định vị cảm ứng kép NCS32100
NCS32100 truyền một sóng hình sin 4 MHz vào cuộn dây kích thích, tạo ra một trường điện từ xung quanh nó. Do định luật cảm ứng của Faraday, các cuộn dây mịn và thô của rô-to giao nhau với trường điện từ, truyền năng lượng vào các cuộn dây của rô-to dưới dạng dòng điện xoáy. Những dòng điện xoáy này tạo ra điện áp lên đến 100mV trên các cuộn dây của stato kết nối với tám đầu vào của NCS32100.
NCS32100 đo vị trí rô-to bằng cách giải mã 8 đầu vào, sau đó chuyển đổi sang dạng kỹ thuật số và xử lý. Thông tin này được đưa vào một bộ vi điều khiển Arm Cortex M0+ (MCU) để cung cấp khả năng cấu hình cao. MCU cung cấp dữ liệu vị trí và tốc độ tuyệt đối, được gửi qua giao diện RS-485 từ bảng tham chiếu.
Việc tự hiệu chuẩn của cảm biến có thể hoàn thành trong chưa đầy hai giây qua một lệnh duy nhất nếu rô-to quay từ 100 đến 1.000 RPM. Các hệ số kết quả được lưu trữ trong bộ nhớ nhúng. Mặc dù có hiệu suất cao, thiết kế cảm ứng kép này lại đơn giản để tích hợp.


 Thăng hạng giải đấu cùng chế độ bóng đá AI và Vision AI Companion của Samsung TV
Thăng hạng giải đấu cùng chế độ bóng đá AI và Vision AI Companion của Samsung TV

 Đột phá chống lão hóa: Enzyme mới có thể loại bỏ hợp chất AGE – "thủ phạm" gây già hóa và nhiều bệnh mạn tính
Đột phá chống lão hóa: Enzyme mới có thể loại bỏ hợp chất AGE – "thủ phạm" gây già hóa và nhiều bệnh mạn tính
 Nâng cấp góc làm việc tại nhà: Chọn màn hình Samsung thế nào để không mua thừa tính năng?
Nâng cấp góc làm việc tại nhà: Chọn màn hình Samsung thế nào để không mua thừa tính năng?