Robot len lỏi tìm kiếm nạn nhân trong thảm họa
Các nhà nghiên cứu tại Phòng thí nghiệm MIT Lincoln phối hợp với Trường Đại học Notre Dame đã sáng tạo ra một mô hình robot ống dây có thể len lỏi giữa các đống đổ nát để tìm kiếm nạn nhân trong thảm họa.
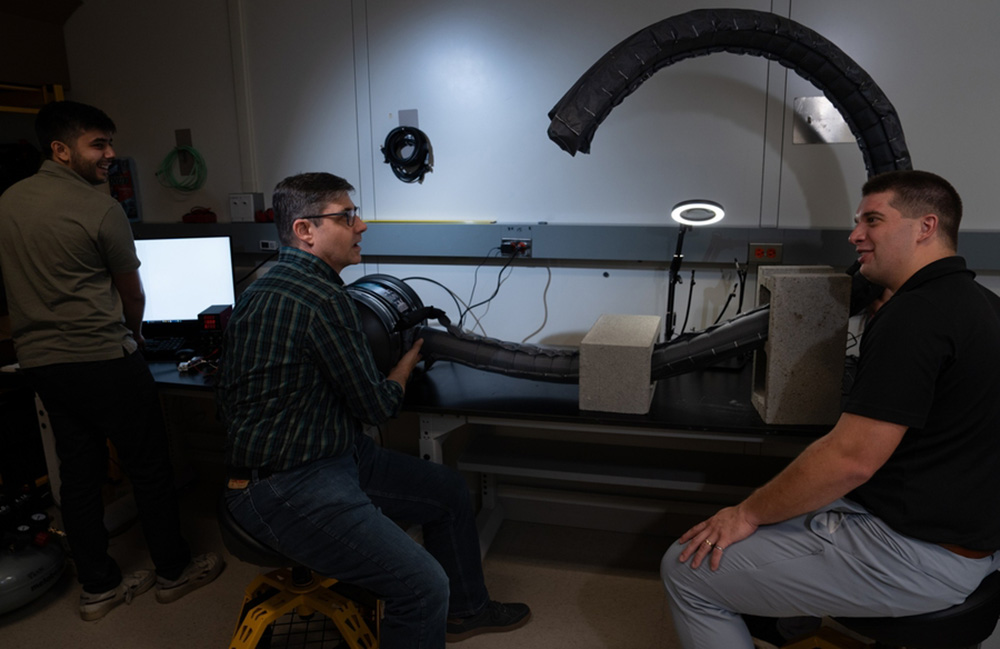
Thực tập sinh nghiên cứu Ankush Dhawan và các nhân viên Phòng thí nghiệm Lincoln Chad Council và Nathaniel Hanson
Khi một thảm họa lớn xảy ra, các nhân viên ứng phó khẩn cấp có trách nhiệm tìm kiếm những người bị mắc kẹt dưới đống đổ nát và cẩn thận đưa những nạn nhân này ra khỏi môi trường nguy hiểm. Công việc tìm kiếm và giải cứu rất mệt mỏi, kéo dài suốt ngày đêm này có thể diễn ra trong nhiều ngày hoặc vài tuần tùy thuộc vào quy mô, địa hình của vụ thảm họa.
Trong khi những robot truyền thống làm việc để khắc phục thảm họa, khảo sát các đỉnh đống đổ nát, khiến chúng có thể bị hư hỏng, khó hoạt động ở những vị trí chật hẹp, không ổn định. Nhóm nghiên cứu Ankush Dhawan và các nhân viên Phòng thí nghiệm Lincoln Chad Council và Nathaniel Hanson đã tạo ra robot SPROUT có thể di chuyển xung quanh các chướng ngại vật và len lỏi qua không gian nhỏ.

Robot mềm dạng ống dây có thể thổi phồng và xì hơi bằng không khí để chui dưới các cấu trúc bị sập. Các nhà nghiên cứu MIT - Notre Dame cho biết các nhân viên ứng phó khẩn cấp có thể điều khiển từ xa để thăm dò, lập bản đồ và tìm các tuyến đường xâm nhập tối ưu qua các mảnh vỡ. Robot này cũng được thiết kế để có chi phí thấp và dễ vận hành.
Robot SPROUT được tạo thành từ một ống bơm hơi bằng vải kín, ống được mở ra từ một đế cố định với một động cơ điều khiển việc triển khai. Ở đầu ống, nhóm nghiên cứu đã gắn một camera và các cảm biến khác. Khi ống phồng lên, nó mở rộng len vào các thành đống đổ nát, ép qua các lối đi chật hẹp, trong khi các cảm biến của nó có nhiệm vụ chụp ảnh và lập bản đồ địa hình.
Hiện tại, robot SPROUT có thể được vận hành bằng cần điều khiển và màn hình hiển thị nguồn cấp dữ liệu camera của robot. Nó có thể triển khai lên đến 10 ft. (3 M) và nhóm đang làm việc để mở rộng nó lên 25 ft. (7,6 m).
Thiết kế linh hoạt của robot SPROUT làm cho nó có khả năng xâm nhập vào không gian nhỏ, nhưng nó cũng đặt ra một số thách thức kỹ thuật cho các nhà nghiên cứu. Nhóm nghiên cứu đã phải tạo ra một hệ thống điều khiển có thể xác định chính xác cách áp dụng áp suất không khí bên trong robot có thể biến dạng để nó di chuyển đến nơi người vận hành đang hướng nó đến. Ngoài ra, nhóm nghiên cứu phải thiết kế ống hơi làm sao để giảm thiểu ma sát trong khi robot di chuyển trong đường hẹp.


 "Chìa khóa" để xây dựng nhà máy thông minh hay thách thức mới của doanh nghiệp?
"Chìa khóa" để xây dựng nhà máy thông minh hay thách thức mới của doanh nghiệp?
 Chiến dịch 500 ngày đêm: Công nghệ ADN thế hệ mới mở thêm hy vọng tìm lại tên cho các liệt sĩ
Chiến dịch 500 ngày đêm: Công nghệ ADN thế hệ mới mở thêm hy vọng tìm lại tên cho các liệt sĩ