Nền tảng in 3D cho phép tự sản xuất động cơ tại chỗ
Một nhóm nhà nghiên cứu tại Massachusetts Institute of Technology (MIT) vừa công bố nền tảng in 3D đa vật liệu có khả năng chế tạo một động cơ tuyến tính hoàn chỉnh chỉ trong vài giờ. Đột phá này mở ra viễn cảnh các nhà máy có thể tự in động cơ thay thế ngay tại chỗ, thay vì phụ thuộc vào chuỗi cung ứng toàn cầu và chờ đợi linh kiện từ nhà sản xuất.
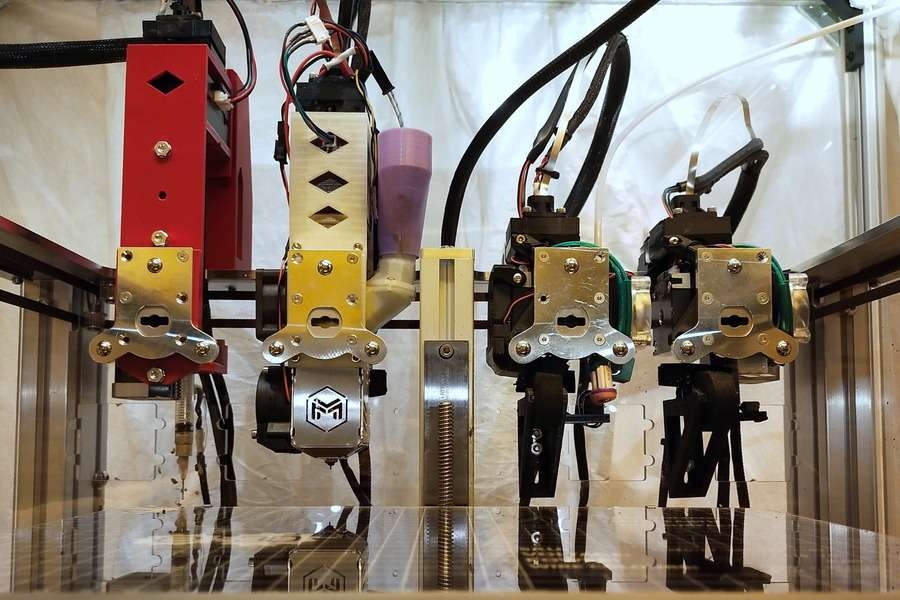
Các công cụ được sử dụng trong nền tảng in động cơ 3D của MIT. Từ trái sang phải: máy đùn mực; máy đùn hạt nhựa; máy đùn sợi nhựa; và bộ phận gia nhiệt. Ảnh: Do các nhà nghiên cứu cung cấp
Trong môi trường sản xuất tự động, khi động cơ gặp sự cố, toàn bộ dây chuyền có thể phải tạm dừng. Nếu không có sẵn linh kiện dự phòng, doanh nghiệp buộc phải đặt hàng và chờ giao, gây gián đoạn và tổn thất đáng kể. Việc chế tạo động cơ truyền thống đòi hỏi thiết bị chuyên dụng, nhiều bước xử lý phức tạp và chỉ có thể thực hiện tại các cơ sở chuyên biệt.
Hệ thống mới của MIT được thiết kế để giải quyết bài toán này. Nền tảng sử dụng công nghệ in đùn 3D với bốn đầu đùn độc lập, cho phép xử lý đồng thời năm loại vật liệu khác nhau, bao gồm vật liệu dẫn điện, vật liệu từ cứng và các thành phần điện môi. Máy in có thể tự động chuyển đổi giữa các đầu đùn để tạo ra cấu trúc động cơ từng lớp một. Sau khi in xong, nhóm nghiên cứu chỉ cần thực hiện một bước xử lý bổ sung từ hóa vật liệu từ cứng để hoàn thiện thiết bị.
Theo nhóm phát triển, động cơ in 3D đạt hiệu năng tương đương, thậm chí vượt trội so với các động cơ được chế tạo bằng phương pháp truyền thống phức tạp hơn. Đáng chú ý, toàn bộ quá trình in một động cơ tuyến tính chỉ mất khoảng 3 giờ, với chi phí vật liệu ước tính khoảng 50 xu Mỹ.
Thách thức lớn nhất của dự án nằm ở việc tích hợp nhiều phương pháp ép đùn khác nhau vào cùng một nền tảng. Vật liệu dẫn điện hiệu suất cao thường tồn tại ở dạng mực và cần hệ thống ép đùn áp suất riêng biệt, trong khi các vật liệu nhựa hoặc điện môi lại yêu cầu vòi phun gia nhiệt. Nhóm nghiên cứu đã cải tiến máy in hiện có, bổ sung hệ thống cảm biến và khung điều khiển mới để đảm bảo từng lớp vật liệu được căn chỉnh chính xác tuyệt đối, bởi chỉ một sai lệch nhỏ cũng có thể làm giảm hiệu suất động cơ.
Nguyên mẫu được chế tạo là một động cơ tuyến tính tương tự loại sử dụng trong robot gắp đặt, hệ thống quang học hoặc băng tải công nghiệp. Theo các thử nghiệm ban đầu, động cơ có khả năng tạo lực truyền động cao, thậm chí vượt trội so với một số cơ cấu truyền động tuyến tính dựa trên hệ thống thủy lực phức tạp.
Về dài hạn, nhóm nghiên cứu tin rằng nền tảng này có thể mở rộng để chế tạo nhanh linh kiện điện tử tùy chỉnh cho robot, thiết bị y tế và nhiều ứng dụng công nghiệp khác, đồng thời giảm đáng kể lượng chất thải. Trong tương lai, họ đặt mục tiêu tích hợp luôn bước từ hóa vào quy trình in, phát triển động cơ quay in 3D và bổ sung thêm công cụ để chế tạo nguyên khối các hệ thống điện tử phức tạp hơn.
Nếu thành công ở quy mô thương mại, công nghệ này có thể làm thay đổi căn bản cách thức sản xuất phần cứng từ mô hình tập trung sang sản xuất phân tán, linh hoạt và tức thời.


 "Chìa khóa" để xây dựng nhà máy thông minh hay thách thức mới của doanh nghiệp?
"Chìa khóa" để xây dựng nhà máy thông minh hay thách thức mới của doanh nghiệp?
 Chiến dịch 500 ngày đêm: Công nghệ ADN thế hệ mới mở thêm hy vọng tìm lại tên cho các liệt sĩ
Chiến dịch 500 ngày đêm: Công nghệ ADN thế hệ mới mở thêm hy vọng tìm lại tên cho các liệt sĩ